
History of CNC Machining Part 1: The People, Stories, and Inventions That Made Today’s Tech Possible

At Bantam Tools, we create desktop CNC (computer-numerically controlled) machines with reliability and precision. We set out on a journey to explore the history of CNC. The comprehensive story hasn’t been told, and we feel it should be, so we invested the time to research it. What we found was an intriguing story of the human quest for increased efficiency and precision through machinery.
In this three-part series, we share what we learned. While we did dig deep, if we missed an important person or device, please let us know in the comments. Be sure to check out Part 2, The Evolution from NC to CNC, and Part 3, From the Factory Floor to the Desktop.
Please Note: This article was originally published in Bantam Tools CNC Life.
Here in Part 1, we first look at predecessor mechanisms that laid the foundation and the series of events that led to the birth of numerical control. Let’s start with the absolute basics:
At the core, a machine tool is one where the machine guides the toolpath — as opposed to it being guided by direct, freehand human guidance, such as with hand tools and pretty much every tool until machine tooling was invented. Numerical control (NC) means using programmable logic (data in the form of letters, numbers, symbols, words, or a combination) to automate control of machining tools. Before its advent, machining tools were invariably controlled by human operators. Computer numerical control (CNC) then is when precisely coded instructions are sent to a microprocessor in the control system of a machining tool, enabling an enhanced level of precision and consistency. When people today talk about CNC, they almost always mean a milling machine connected to a computer. Technically, it can be used to describe any machine controlled by a computer.
Predecessor Mechanisms
A number of inventions were essential to laying the foundation for the development of CNC machines. Here, we look at four essentials: early machine tools, punched cards, servomechanisms, and the Automatically Programmed Tool (APT) programming language.
Early Machine Tools
First, a shout out to what is widely considered the first machine tool: In 1775, John Wilkinson’s boring machine was the solution to accurately boring cylinders for steam engines. James Watt is credited with creating the steam engine that powered the Second Industrial Revolution in England, but he was having issues obtaining consistent precision in his steam engine cylinders — until Wilkinson crafted his engine cylinder boring machine, based on the design of his original cannon-boring machine.

“”Wilkinson hath bored us several cylinders that doth not err to the thickness of an old shilling in no part.” ”
Punched Cards
In 1725, French textile worker Basile Bouchon invented a way to control looms by using data encoded on paper tapes through a series of punched holes. While groundbreaking, this method was fragile and still required an operator. In 1805, Joseph Marie Jacquard adopted this concept but strengthened and simplified it by tying punched sturdier cards in sequence, thereby automating the process. These punched cards are widely regarded as foundational for what was to become modern computing, and signaled the end of the cottage industry in weaving.
Interestingly, the Jacquard loom was met with resistance by the silk weavers of the time, who feared this automation would rob them of their jobs and livelihood. They repeatedly burned the looms that were put into production; however, their resistance proved futile as the industry recognized the advantages of the loom. By 1812, in France, there were 11,000 Jacquard looms in use.

Punched cards used in a Jacquard loom, as seen at the German Museum of Technology in Berlin. [Image Source]
Punched cards developed throughout the second half of the 1800s and found many uses, from telegraphy to self-playing pianos. While the early cards determined mechanical control, American inventor Herman Hollerith pioneered an electromechanical punched card tabulator, changing the game. His system was patented in 1889, while he was working for the United States Census Bureau.
In 1896, he founded the Tabulating Machine Company, which was consolidated with four other companies to form IBM in 1924. In the latter half of the 20th century, punched cards were first used for data input and storage in computers and numerically controlled machines. The original format featured five rows of holes, while subsequent versions had six, seven, eight or more rows.

Servomechanisms
A servomechanism is an automatic device that uses error-sensing feedback to correct the performance of a machine or mechanism. In some cases, the servo allows control of large amounts of power by a device with much lower power. A servomechanism is comprised of a device being controlled, another device that gives commands, an error detector, an error-signal amplifier, and a device to correct the errors (the servomotor). Servos are typically used to control variables like position and speed and are most commonly electrical, pneumatic, or hydraulic.
The first electric servomechanism was created in England by H. Calendar in 1896. By 1940, MIT had created a dedicated Servomechanisms Laboratory, which grew out of the Department of Electrical Engineering’s increased attention to the subject. In CNC machining, servos are essential to attaining the required tolerances of the automated machining process.

The word servomotor is credited to J.M. Farcot’s 1868 usage of “le servomoteur” (slave motor) to describe hydraulic and steam engines for use in ship steering. Nikola Tesla used an electric servomechanism to steer his models ships remotely; he was granted a patent for his system in 1898, seen here.
Automatically Programmed Tool (APT)
Born out of the MIT Servomechanisms Lab in 1956, as a brainchild of the Computer Applications Group, Automatically Programmed Tool (APT) is an easy-to-use, high-level programming language intended specifically to generate instructions for numerically controlled machine tools. The original version preceded FORTRAN, but later versions were rewritten in FORTRAN.
APT was the language created to work with MIT’s first NC machine, one of the first in the world. It went on to become the standard for programming computer-controlled machine tools and was used widely through the 1970s. Development of APT was sponsored by the Air Force, and it was eventually added to the public domain.
The head of the Computer Applications Group, Douglas T. Ross, is known as the father of APT. He also later coined the term “computer-aided design” (CAD).
The Birth of Numerical Control
Before the advent of computer-numerically controlled machines, first came the development of numerical control and the first NC machine tools. And while there are some discrepancies in different accounts of the historical details, the first NC machine tools were both a response to specific manufacturing challenges faced by the military as well as a natural progression of the punch card system.
““Numerical control marked the beginning of the second industrial revolution and the advent of an age in which the control of machines and industrial processes would pass from imprecise draft to exact science.” ”
MEET JOHN T. PARSONS, THE FATHER OF NUMERICAL CONTROL

American inventor John T. Parsons (1913–2007) is widely considered the father of numerical control, which he conceived and implemented with the help of aircraft engineer Frank L. Stulen. The son of a Michigan manufacturer, Parsons began working in his father’s factory as an assembler at the age of 14. Later, he owned and operated a number of manufacturing plants under the family business, Parsons Manufacturing Co.
Parsons holds the first NC patent and was inducted in the National Inventors Hall of Fame for his groundbreaking work in numerical control. In total, Parsons holds 15 patents, with another 35 granted to his business. The Society of Manufacturing Engineers interviewed Parsons in 2001 to get the story from his perspective. This engaging read is available in an online archive.
Early NC Timeline
1942: John T. Parsons is subcontracted by Sikorsky Aircraft to build helicopter rotor blades.
“Sikorsky was making blades by hand. I made assembly fixtures. Blades were complicated because a balance weight was installed on the front end of the blade to help with the tilt up for the pitch-change angle. My assembly techniques worked out great.” — John T. Parsons
1944: Caused by a design flaw in the spar, one of the first 18 blades they made fails, killing the pilot. Parsons has the idea to stamp the rotor blades out of metal to make them stronger and eliminate the glue and screw fastening.
1946: Creating a manufacturing tool to produce the blades precisely was going to be complicated, so Parsons hires aircraft engineer Frank Stulen and puts together an engineering team with three others. Stulen has the idea to employ IBM punch cards to determine the stress levels on the blades, and they rent seven IBM machines for the project.
“In 1948, the goal of easily varying the sequence of movements of an automatic machine tool — as contrasted with merely setting in motion a fixed sequence — was being pursued in two principal ways: tracer control and numeric control. The first, as we have seen, required a physical model of the object to be fabricated (or at least a complete drawing of it, as with the Cincinnati Line-Tracer Hydro-Tel). The second required not an image of the finished object or part, but only an abstraction of it: a mathematical model and instructions to the machine.” — Electricity in the American Economy
1949: The U.S. Air Force needs help with ultra-precise wing construction. Parsons pitches his numerically controlled machine and is awarded a $200,000 contract to make it a reality.
1949: Parsons and Stulen had been working with Snyder Machine & Tool Corp. on the machine and realized they need servomotors for their machine to work precisely. Parsons subcontracts the servos for the “Card-a-matic Milling Machines” to the MIT Servomechanisms Laboratory.
1951: The Air Force NC machine deal is now awarded to MIT. There are varying accounts of what happened that led to Parsons getting cut out of the deal: MIT underbid Parsons and Parsons ran out of money are two accounts (see below).
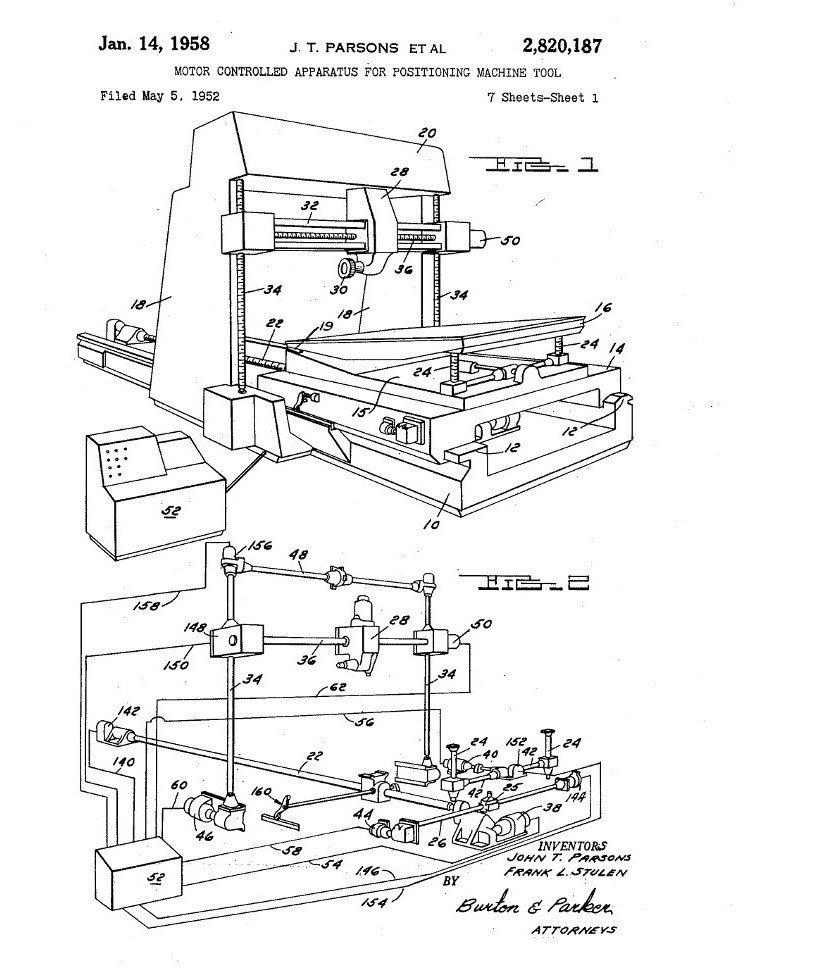
1952 (May): Parsons files a patent for “Motor Controlled Apparatus for Positioning Machine Tool.” He’s granted the patent in 1958.
1952 (August): In response, MIT files patent for “Numerical Control Servo-System.”

MIT’s Account of the Dispute
“After World War II, the U.S. Air Force gave several contracts to the Parsons Corporation to develop further the numerically control machining innovations made by its founder John Parsons. Interested in experiments being conducted at the MIT Servomechanisms Laboratory, Parsons proposed in 1949 that MIT become a project subcontractor to provide expertise on automatic control. Over the next 10 years, MIT gained control over the entire project as the Servomechanisms Laboratory vision of “three-axis continuous path control” supplanted the original Parsons conception of “plunge-cutting positioning.” Conflict always shapes technology but this particular story, chronicled by historian David Noble, has become a significant object lesson in the history of technology.” [source]
Parsons’ Account of the Dispute
“The problem was that MIT overshot their budget with me by about $50,000. I finally had to ask the government for more money for the servomechanism. MIT gave me an amount that I used for the bid then I added on my portion of the work. So I put in my bid for a price increase, and MIT underbid me.
“MIT told me they had one overhead rate for private industry, and another, lower one, for the government. But I never dreamed that anybody as reputable as MIT would deliberately go ahead and take over my project. MIT knew the costs were going up, and they were afraid the government might back out on the whole deal. They were even looking for a machine to experiment with. MIT was aware of a lot of government surplus machine tools used during World War II, and they went looking for one, which ended up being a Cincinnati Hydro-Tel vertical milling machine with a 24×60” bed size. At this point, MIT negotiated a new contract with the Air Force that essentially removed the Parsons Company from further development of the NC system.” [source]
1952: MIT demonstrates their 7-track punch tape system (with article by William Pease in Scientific American), which is complex and expensive (250 vacuum tubes, 175 relays, in 5 refrigerator-sized cabinets).
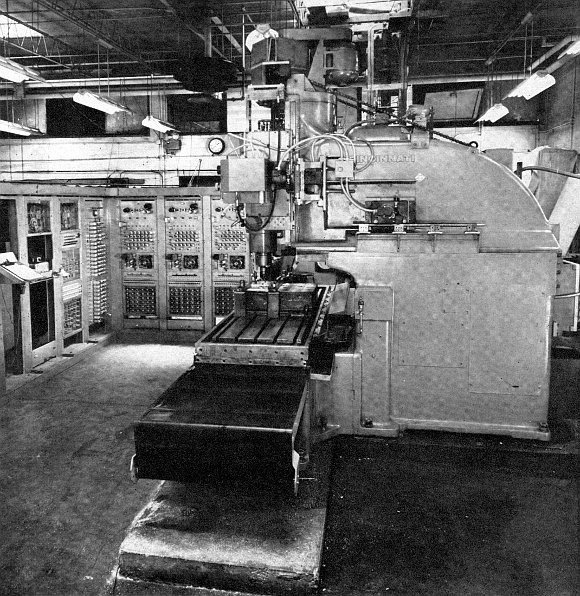
MIT’s original 1952 numerically controlled mill was a retrofitted 3-axis Cincinnati Milling Machine Company Hydro-Tel.
SCIENTIFIC AMERICAN’S SEPTEMBER 1952 ISSUE

Scientific American’s September 1952 issue on Automatic Control was way ahead of its time, featuring a set of seven articles about “self-regulating machines, which represent a scientific and technological revolution that will powerfully shape the future of man.” Modern Mechanix scanned and shared five of the articles, including “An Automatic Machine Tool” by MIT’s William Pease about the first NC machine they created. The tagline reads, “Feedback control has begun to advance in the working of metals. Presenting the first account of a milling machine that converts information on punched tape into the contours of a finished part.”
1955: Concord Controls (formed by members of the original MIT team) creates the Numericord, which replaces the punch tape on the MIT NC machine with a magnetic tape reader that GE is working on.

Storage for magnetic tapes [Image Source]
1958: Parsons receives US Patent 2,820,187 and sells an exclusive license to Bendix. IBM, Fujitsu, and GE all take sub-licenses after having already started development of their own machines.
1958: MIT publishes report on the economics of NC, concluding that the current incarnation doesn’t really save time, but instead shifts labor from factory floor to those creating the punch tapes.
“The M.I.T. system combines digital and analogue processes under feedback control to govern a milling machine whose cutting tool moves in three planes relative to the work piece. In this case the “model” of the object to be fabricated is supplied to the machine in the form of a perforated paper tape similar to that used in teletype systems. For a typical operation, 10 feet of tape will keep the machine busy for an hour.” — William Pease, Scientific American
Video: Sperry Numeric Control Promo Video for Industrial Tape Reader
We wrap up Part 1 of this three-part series with a classic video from the era: a glimpse into the machining era of the 1950s.
“This tape reader can read 20 lines of tape in 200 milliseconds! Designed for reliability as well as speed, it can read a whole block of information as once, thereby eliminating the shift register or memory store that is normal to other systems that use sequential readers.”
Thank you for joining us on this journey through CNC history. At Bantam Tools, we make desktop CNC machines with reliability and precision at an affordable price. Bantam Tools looks forward to further exploring the frontier of creative and empowering machines. Follow our journey on Instagram, Facebook, Twitter, and be sure to subscribe to the Bantam Tools mailing list to receive more content like this.
Continue on to:
Part 2, The Evolution from NC to CNC
Part 3, From the Factory Floor to the Desktop
Researched and written by staff writer Goli Mohammadi for Bantam Tools.